Shape optimization
Procedure of FE-calculation
Energy minimization.
- Step1
- Calculate the finite element approximation $u_h$ of ((2.1) ).
- Step2
- Set $M(\Omega )$, for example, determine the parts $\Gamma _F, \Gamma _V, \Gamma _H$ of $\partial \Omega $ where the shape is fixed on $\Gamma _F$, fixed vertical direction on $\Gamma _V$, and fixed the horizontal direction on $\Gamma _H$. In this case $M(\Omega )$ is defined by \begin{eqnarray*} \{\eta \in H^1(\mathbb{R}^d;\mathbb{R}^d):\, &\eta =0\textrm{ on }\Gamma _F,\, &\eta \cdot n=0\textrm{ on }\Gamma _V,\,\\ &&\eta -(\eta \cdot n)n=0\textrm{ on }\Gamma _H\} , \end{eqnarray*} Use the H1-gradient method; calculate the FE-approximation $\mu ^O_h$ of (3.16) by \begin{eqnarray} b_h(\mu ^O_h,\eta _h)&=& R_{\Omega }(u_h,\eta _h)+ \int _{\partial \Omega }fu_h(\eta _h\cdot n)ds ~~ ∀\eta _h\in M(\Omega ) \tag{3.28} \end{eqnarray} Here $b_h(\cdot ,\cdot )$ is an FE-approximation of $b_{E}$ or $b_{A}$ (e.g. [A-P06, Al07]) \begin{eqnarray*} b_{E}(\mu ,\eta )&=&\int _{\Omega }(\nabla \mu :\nabla \eta +\mu \cdot \eta )dx \\ b_{A}(\mu ,\eta )&=&\int _{\Omega }\left \{\frac{1}{2}\sigma _{ij}(\mu )\varepsilon _{ij}(\eta )+\mu \cdot \eta \right \} dx\notag \\ \sigma _{ij}(\mu )&=&\lambda \textrm{div}\mu \delta _{ij}+2G\varepsilon _{ij}(\mu ), \, \varepsilon _{ij}(\mu )=\frac{1}{2}\left (\frac{\partial \mu _{i}}{\partial x_j} +\frac{\partial \mu _{h,j}}{\partial x_i}\right )\notag \\ \lambda &=& \frac{E\nu }{(1+\nu )(1-2\nu )}, G=\frac{E}{2(1+\nu )}\\ &&(E:\textrm{Young's modulus},\, \nu :\textrm{Poisson ratio}) \end{eqnarray*} $b_A$ is complex, but we can control deformation by controlling the constants $\lambda $ and $G$.
- Step3
- Calculate the constraint by the H1-gradient method. For example, if the volume (area) is constant, calculate $\mu ^c_h$ by \begin{equation} b_h(\mu ^c_h,\eta _h) =-\int _{\Omega }\textrm{div}\eta _h\, dx ~~ ∀\eta _h\in M(\Omega ) \tag{3.29} \end{equation}
- Step4
- Incorporate constraint conditions using the Lagrangian multiplier method. If the volume (area) is constant, calculate $$ \lambda =-\ell _o/\ell _c,~ \ell _o=\int _{\Omega }\textrm{div }\mu ^O_h\, dx,~ \ell _c=\int _{\Omega }\textrm{div }\mu ^c_h\, dx,$$ and set $\mu ^O_h=\mu ^O_h+\lambda \mu ^c_h$.
- Step5
- Properly take $\epsilon \gt 0$ and make a new mesh $\mathcal{T}_h(\Omega ^{\varphi _{\epsilon }})$ $$ \Omega ^{\varphi _{\epsilon }}=\{\varphi _{\epsilon }(x):\, x\in \Omega \} ,\, \varphi _{\epsilon }(x)=x+\epsilon \mu ^O_h(x)$$ Here $\epsilon \gt 0$ must be taken to be that $\mathcal{E}(u^{\varphi _\epsilon }_h;f,g,\Omega ^{\varphi _\epsilon }) \le \mathcal{E}(u_h;f,g,\Omega )$. If the inequality does not satisfy, we need to take a smaller $\epsilon $.
- Step6
- By repeating (Step1)--(Step5), we can get shapes that are more optimized.
interface problems
For the interface problems (Section 2.5.3
, also called transmission problems), it is necessary to change (1)--(3) in just above as follows. - Step1
- Calculate the finite element approximation $u_h$ of ((2.50) ).
- Step2
- Use the H1-gradient method; calculate the FE-approximation $\mu ^O_h$ by (3.18) \begin{eqnarray} b_h(\mu ^O_h,\eta _h)&=& \sum _{\kappa =1}^K R_{\Omega _{\kappa }}(u_h,\eta _h)+ \int _{\partial \Omega }fu_h(\eta _h\cdot n)ds ~~ ∀\eta _h\in M(\Omega ) \tag{3.30} \end{eqnarray}
- Step3
- Calculate the constraint by the H1-gradient method. In interface problems, we can consider the case that the shape of the boundary $\partial \Omega $ is fixed, but the interfaces $(\partial \Omega _{\kappa }\cap \partial \Omega _l)\setminus \partial \Omega , \kappa \neq l$ can move,
Mean compliance.
Only change (3.28)
to
\begin{equation} b_h(\mu _h^O,\eta _h)=-2\left \{R_{\Omega }(u_h,\eta _h)+\int _{\partial \Omega } fu_h(\eta _h\cdot n)ds\right \} \tag{3.31}
\end{equation} Examples are in Section 4.3
, and the case of the interface is in Section 4.4
. Least mean-square error, etc.
The shape derivative of the cost function $\int _{\Omega }\widehat{g}(u)dx$ is represented by $\delta R_{\Omega }(u,\mu _{\varphi })[u_g]$ (3.7)
using the adjoint variable $u_g$. - \li Calculate $u_{h}$ of the problem (2.1)
. \li Calculate FE-approximation $u_{g,h}$ of the problem (3.8)
$$ \mathcal{E}(u_{g,h};\nabla _z\widehat{g}(u_h),0,\Omega ) =\min _{v_h\in V_h(\Omega )} \mathcal{E}(v_h;\nabla _z\widehat{g}(u_h),0,\Omega )$$ \li Use H1-gradient method such as
\begin{eqnarray} &&-b_h(\mu ^O_h,\eta _h)=\delta R_{\Omega }(u_h,\eta _h)[u_{g,h}]\\ &&~+\int _{\partial \Omega }(fu_{g,h}+\widehat{g}(u_h)-\nabla _z\widehat{g}(u_h)u_h)(\eta _h\cdot n)ds ~~ ∀\eta _h\in M(\Omega )\notag \tag{3.32}
\end{eqnarray} \li Incorporate constraint conditions using Lagrangian multiplier method.
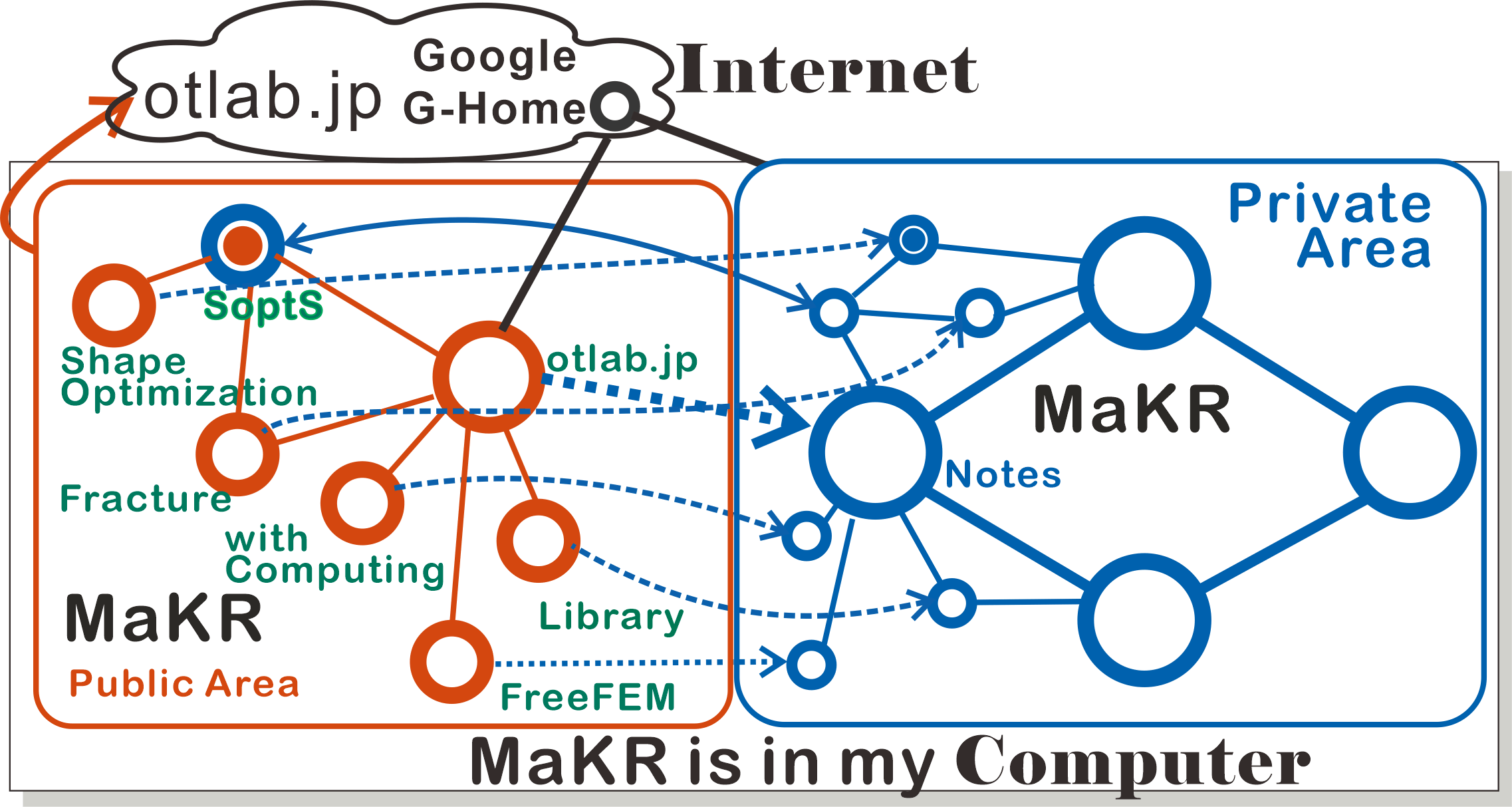
Information about the page: The current position is painted circle in the diagram below. Blue is the main MaKR and orange is a duplicate for MaKR's public use, where dashed line means the connection to the private area The dashed lines are only connections to main MaKR.